|
|
Common Vision Blox 15.0
|
|
|
Common Vision Blox 15.0
|
| C++ | .NET | Python |
| Cvb::ShapeFinder2 | Stemmer.Cvb.ShapeFinder | cvb.shapefinder2 |
ShapeFinder is a search tool to find previously trained objects in newly acquired images. The algorithm is designed following the principles of the Generalized Hough Transform (GHT).
ShapeFinder returns the object location with subpixel accuracy as well as the rotation angle and the scaling of the object(s) found. One particular feature of the software is its tolerance to changes in the object that may appear in production lines such as:
The user has the choice between an extremely fast or a slightly slower but more accurate and more reliable recognition.
ShapeFinder generally operates on images provided by the Common Vision Blox Image Manager. The input images, however, must meet certain criteria for ShapeFinder to work on them:
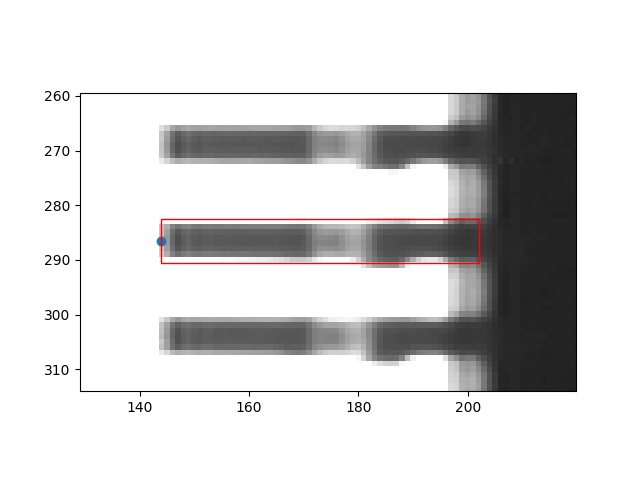
The CVB APIs provide functions to train a dedicated pattern with ShapeFinder. To do this, a point must be given in the image that specifies the position of the pattern and an axis-aligned rectangular region that contains the pattern. The region is always specified relative to the point, i.e. in the form of the values left, top, right, bottom.
The following code gives an example of how to train the pin of a computer chip. The aim of the example is to find all pins and determine their rotational positions. For training, we select a random pin from the left side of the chip.
The above python code will produce the following image
Using the default settings, the classifier is created with complete rotational invariance and no scale invariance. This can be controlled by setting corresponding minimum and maximum values of the ClassifierFactory object. In this case, the classifier should find all pins, as they vary in their rotational position but not in their scaling.
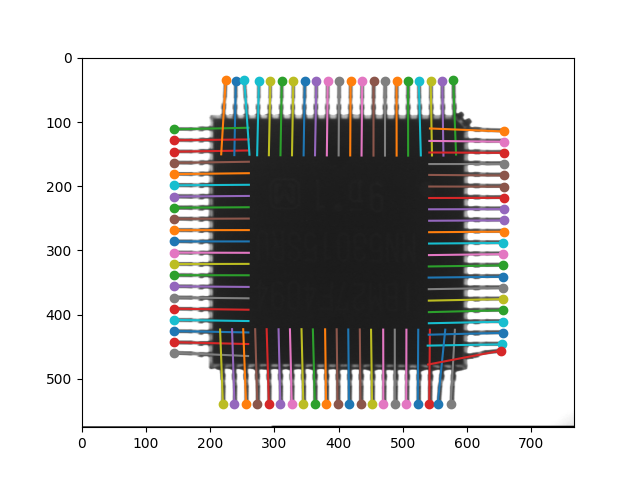
We examine the image by searching for all pins in the entire image area and determining their respective position and rotation.
The above python code will produce the following image
Shapefinder operates on a certain pyramid layer of the original image, which is determined during the training process. The depth of the pyramid from which the training process selects the layer can be defined by the parameter MaxCoarseLayer. The layer actually selected can be retrieved after training under CoarseLayer.
Depending on which value is used for the Precision parameter in the search process, the results found on this coarse scale layer are processed further or not. The precision mode parameter influences the search process as follows:
The features which Shapefinder uses for pattern recognition are gradient magnitudes and directions. Accordingly, the minimum_threshold parameter in the search function refers to a minimum value for the gradient magnitude in order to be counted as a feature. The relative_threshold relates to the consideration of further search results relative to the best result, while the coarse_locality value describes a required minimum distance between two results.
| Example | Description |
|---|---|
| QTShapeFinder2 (QML C++ version) | Detect screws (QML C++ version) |
| Python example | Detect screws (Python version) |