|
| static Cuboid | CalculateBoundingBox (this PointCloud pc) |
| | Calculates the minimum and maximum extent of the point cloud. More...
|
| |
| static Point3Dd | CalculateCenterOfGravity (this PointCloud pc) |
| | Calculates the center of gravity of the point cloud. More...
|
| |
| static Matrix3D | CalculateCovarianceMatrix (this PointCloud pc) |
| | Calculates the covariance matrix of the point cloud. More...
|
| |
| static Geometry3D.Plane | FitPlane (this PointCloud pc) |
| | Fits a plane in the points of the PointCloud pc . More...
|
| |
| static Geometry3D.Plane | FitPlane (this PointCloud pc, Cuboid aoi) |
| | Fits a plane in the points of the PointCloud pc restricted by the given aoi . More...
|
| |
| static PointCloud | Crop (this PointCloud pc, Cuboid clipBox) |
| | Creates a new point cloud which is a copy of this point cloud, which only consists of the points inside the given clipBox . More...
|
| |
| static PointCloud | FrustumCrop (this PointCloud pc, Cuboid clipBox, Angle theta, Angle phi) |
| | Creates a new point cloud which only cosists of the points inside the clipBox , where the orientation of the two boundary planes Z=Zmin and Z=Zmax can be modified by angles theta and phi . More...
|
| |
| static PointCloud | PlaneCrop (this PointCloud pc, Geometry3D.Plane plane, ValueRange< double > range, CropRange cropRange) |
| | Creates a new point cloud where points within or outside a range parallel to given plane are cropped. More...
|
| |
| static PointCloud | PlaneCrop (this PointCloud pc, Geometry3D.Plane plane, double threshold, CropDirection cropBelowAbove=CropDirection.Below) |
| | Creates a new point cloud which only consists of the points below or above given plane . More...
|
| |
| static PointCloud | DownsampleByFactor (this PointCloud pc, int factor) |
| | Creates a new point cloud which is a copy of this point cloud, with every nth point removed (n being defined by the given factor ). More...
|
| |
| static PointCloud | DownsampleRandomly (this PointCloud pc, int amount) |
| | Creates a new point cloud which is a copy of this point cloud, with n random points removed (n being defined by the given amount ). More...
|
| |
| static PointCloud | Scale (this PointCloud pc, Factors3D factors) |
| | Creates a new point cloud which is a copy of this point cloud, with all points scaled by the given factors . More...
|
| |
| static Image | ToRangeMap (this PointCloud pc, ValueRange< double > xRange, ValueRange< double > yRange, Size2D targetSize, double backgroundValue) |
| | Creates a new range map image via linear project in negative z direction. More...
|
| |
| static Image | ToRangeMap (this PointCloud pc, ValueRange< double > xRange, ValueRange< double > yRange, int targetWidth, int targetHeight, double backgroundValue) |
| | Creates a new range map image via linear project in negative z direction. More...
|
| |
| static void | Save (this PointCloud pc, string fileName) |
| | Saves this point cloud to the given fileName . More...
|
| |
| static byte[] | ToMemory (this PointCloud pc, PointCloudFlags flags, FileFormat fileFormat) |
| | Saves this point cloud to memory. More...
|
| |
| static void | ToMemory (this PointCloud pc, IntPtr buffer, long bufferSize, PointCloudFlags flags, FileFormat fileFormat) |
| | Saves this point cloud to the given buffer . More...
|
| |
Extension methods for PointClouds.
Creates a new point cloud which only cosists of the points inside the clipBox , where the orientation of the two boundary planes Z=Zmin and Z=Zmax can be modified by angles theta and phi .
For theta , phi = 0,0 the function will give the same result as Crop(PointCloud, Cuboid). Angle theta tilts the two Z-boundary planes towards the (positive) Y-axis. Additionally, phi rotates the tilted Z-boundary planes around the Z-axis (for theta =0, phi will have no effect, because it is then just an inplane-rotation). The two Z-boundary planes will stay parallel, but no longer necessarily orthogonal to the lateral boundary planes. Note, that only the Z-boundaries are tilted and not the whole bounding box, i.e. X- and Y-boundaries will stay the same.
- Parameters
-
| pc | PointCloud to frustum crop |
| clipBox | ClipBox Cuboid defining the bounds for the points to be copied (min/max are inclusive) |
| theta | Theta Tilt angle of the two Z-boundary planes Z=Zmin and Z=Zmax towards the positive Y-axis. |
| phi | Phi Rotation angle of the tilted Z-boundary planes around the Z-axis. If Theta = 0, Phi will have no effect. |
- Returns
- Frustum cropped point cloud.
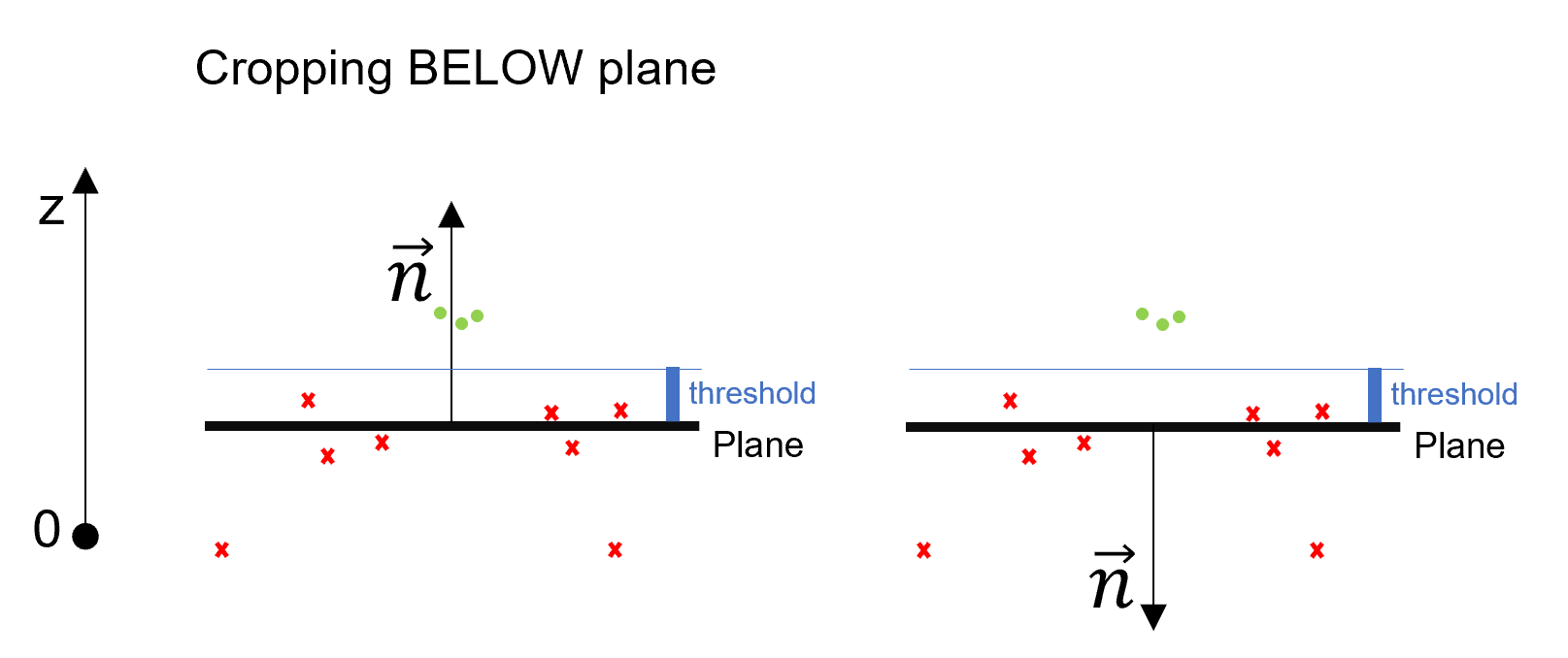
Creates a new point cloud which only consists of the points below or above given plane .
The plane is defined by the hessian normal form:
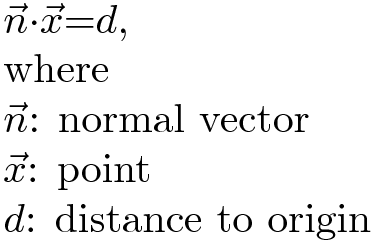
Above plane means all points with z values greater than the plane are cropped.It makes no difference in which direction the given normal points. The normal is always converted, so that it points up (positive z value). Note, if Normal.Z equals 0, "below" and "above" is undefined and thus no cropping is done.Instead the input point cloud will be duplicated.

If the input point cloud is dense, points beyond the plane are set non-confident.Lines and columns at the borders containing only non-confident points are removed.If the input point cloud is dense and does not contain a confidence plane, a confidence plane will be added
to the cropped point cloud.
- Parameters
-
| pc | PointCloud to crop. |
| plane | Points beyond this plane will be cropped. |
| threshold | Points below plane plus this value and points above plane minus this value are cropped respectively. This threshold should be set, if plane is calculated via FitPlane(). It ensures, that all points beyond this plane plus noise are cropped. |
| cropBelowAbove | Indicates if points should either be cropped below or above plane(optional, default value: CropDirection.Below). |
- Returns
- Cropped point cloud.
Creates a new point cloud where points within or outside a range parallel to given plane are cropped.
The plane is defined by the hessian normal form:
Points are cropped within or outside a range parallel to the given plane . The range is defined by range . Note, that range.Max and range.Min are applied along normal direction.
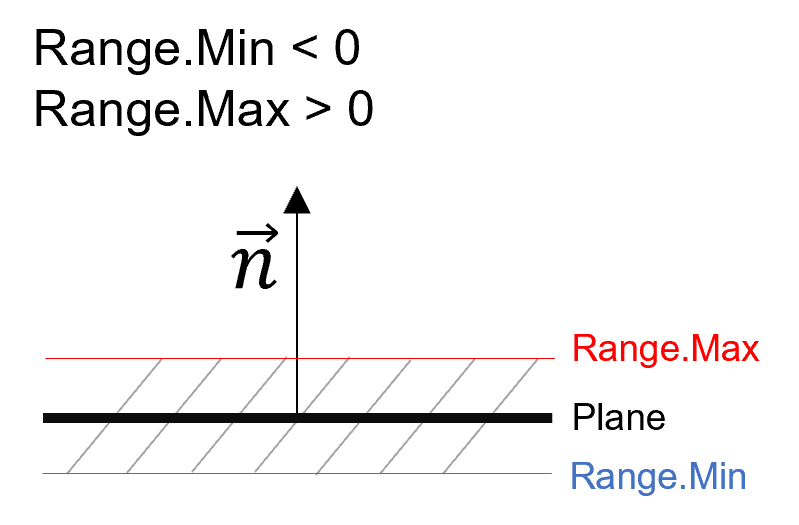


In order to define a range around the plane, maximum and minimum range have to be positive and negative respectively.
If the input point cloud is dense, cropped points are set non-confident. Lines and columns at the borders containing only non-confident points are removed. If the input point cloud is dense and does not contain a confidence plane, a confidence plane will be added to the cropped point cloud.
- Parameters
-
| pc | PointCloud to crop. |
| plane | Points parallel to this plane will be cropped. |
| range | Points within or outside this range will be cropped. |
| cropRange | Indicates whether points should be cropped within or outside the range. |
- Returns
- Cropped point cloud.