|
| DensePointCloudPtr | ToDensePointCloud (size_t &numDroppedPoints, ConversionMode conversionMode=ConversionMode::Automatic) const |
| | Creates a dense point cloud from a sparse point cloud. More...
|
| |
| DensePointCloudPtr | ToDensePointCloud (ConversionMode conversionMode=ConversionMode::Automatic) const |
| | Creates a dense point cloud from a sparse point cloud. More...
|
| |
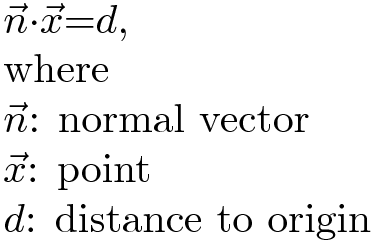
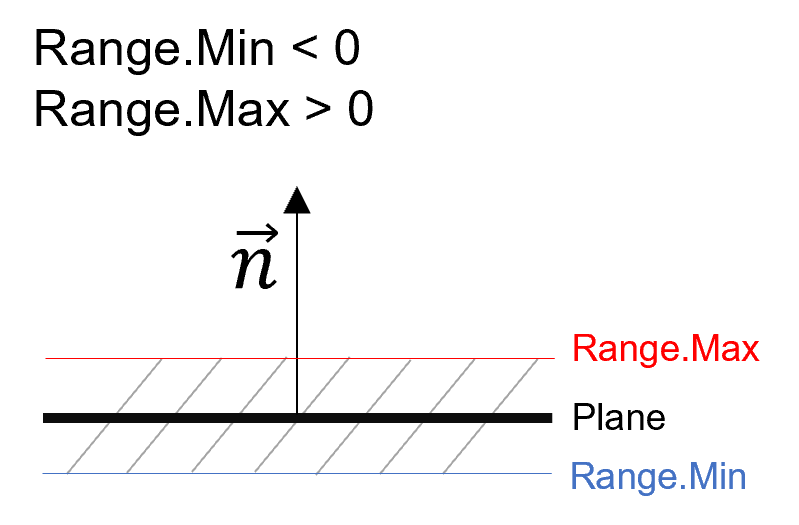
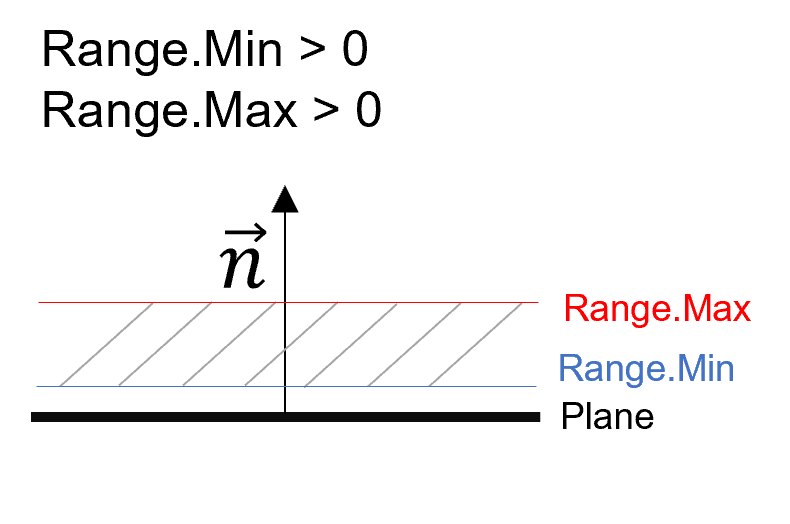
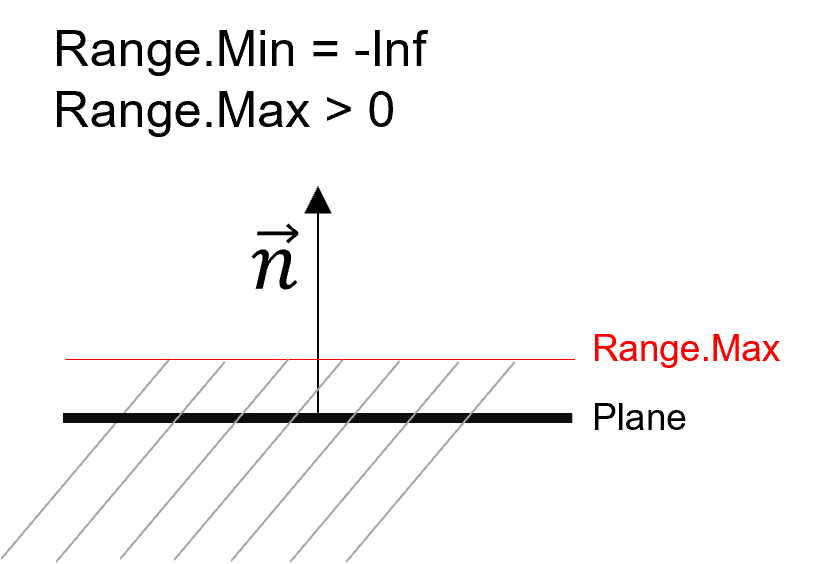
| SparsePointCloudPtr | PlaneCrop (const Plane3D &plane, const ValueRange< double > &range, CropRange cropRange) const |
| | Creates a new point cloud where points within or outside a range parallel to given plane are cropped. More...
|
| |
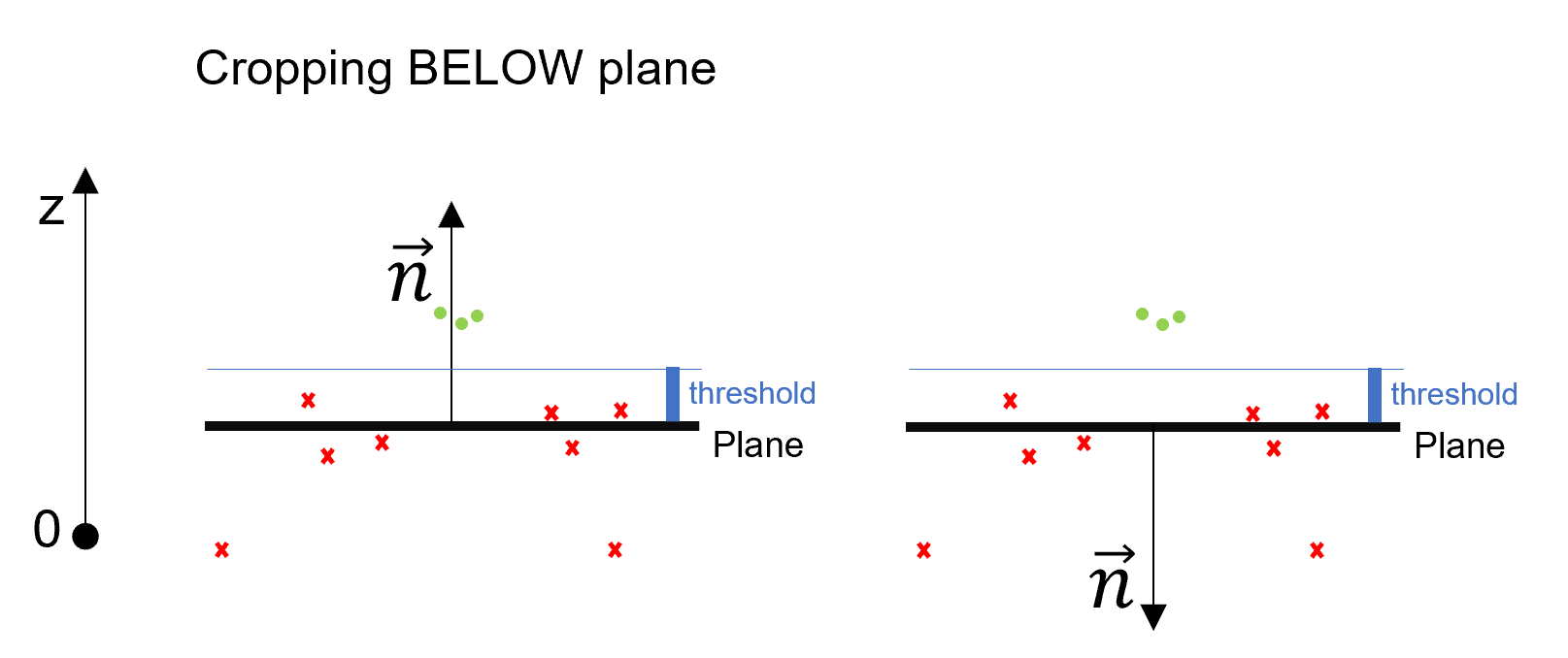
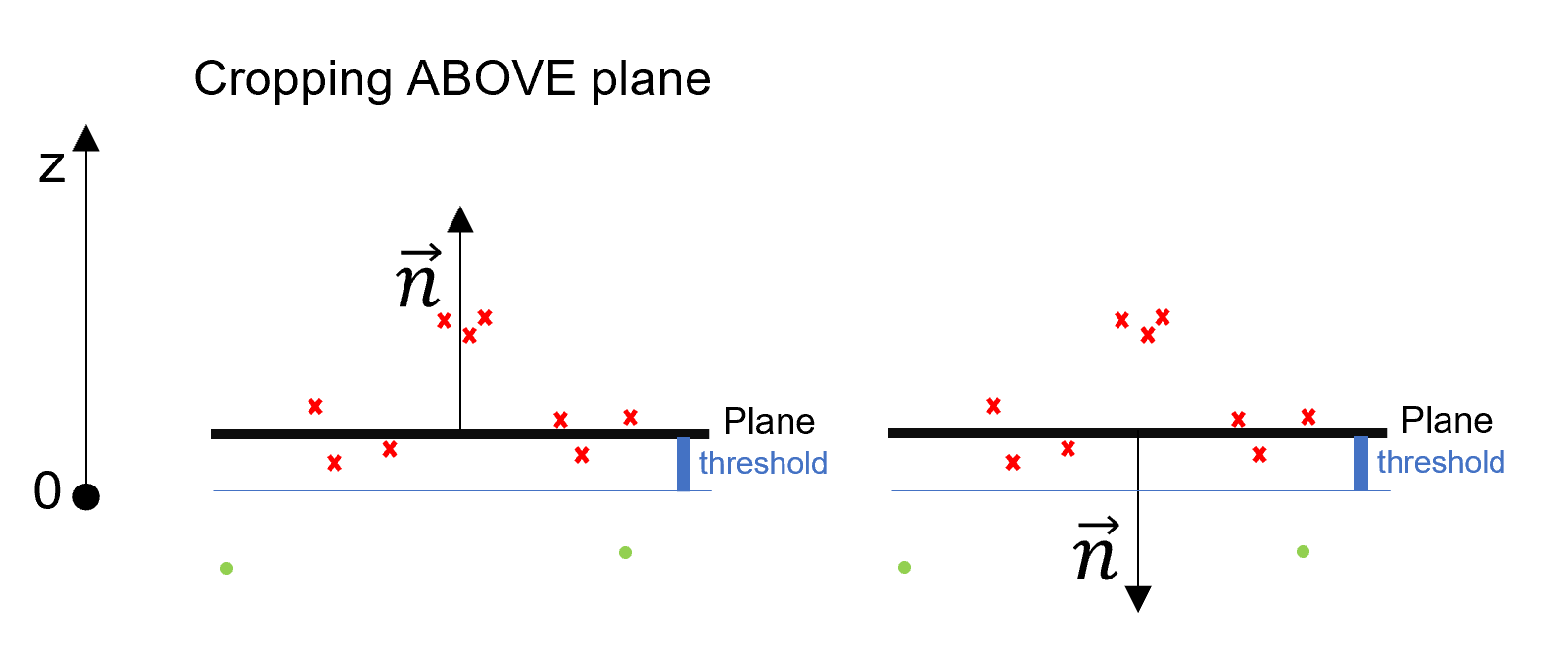
| SparsePointCloudPtr | PlaneCrop (const Plane3D &plane, double threshold, CropDirection cropBelowAbove=CropDirection::Below) const |
| | Creates a new point cloud which only consists of the points below or above given plane. More...
|
| |
| template<class T > |
| SparseComponentsPointers3D< T > | PointComponents () const |
| | Get the point components from the given point cloud. More...
|
| |
| template<class T > |
| bool | TryPointComponents (SparseComponentsPointers3D< T > &components) const noexcept |
| | Tries to get the point components from the given point cloud. More...
|
| |
| PointCloudLayout | Layout () const |
| | Get the layout of the available buffers/planes of the given point cloud. More...
|
| |
| class DataType | DataType () const |
| | Gets the DataType of the x,y,z(,w) components of the given PointCloud. More...
|
| |
| std::size_t | NumPoints () const |
| | Gets the number of x,y,z(,w) points in the given point cloud. More...
|
| |
| ComponentsPointers3D | PointComponents () const |
| | Tries to get the point components from the given point cloud. More...
|
| |
| template<class T > |
| std::size_t | Points (Point3D< T > *&points) const |
| | Gets the 3D points from the given point cloud. More...
|
| |
| template<class T > |
| std::size_t | PointsH (Point3DH< T > *&pointsH) const |
| | Tries to get the 3D points from the given point cloud. More...
|
| |
| Cuboid | CalculateBoundingBox () const |
| | Calculates the minimum and maximum extent of the point cloud. More...
|
| |
| Point3D< double > | CalculateCenterOfGravity () const |
| | Calculates the center of gravity of the point cloud. More...
|
| |
| Matrix3D | CalculateCovarianceMatrix () const |
| | Calculates the covariance matrix of the point cloud. More...
|
| |
| Plane3D | FitPlane () const |
| | Fits a plane in the points of the point cloud without cropping it. More...
|
| |
| Plane3D | FitPlane (const Cuboid &aoi) const |
| | Fits a plane in the points of the point cloud for a specified area of interest. More...
|
| |
| template<class T > |
| std::shared_ptr< T > | Crop (const Cuboid &clipBox) const |
| | Creates a new point cloud which only consists of the points inside the clip box. More...
|
| |
| template<class T > |
| std::shared_ptr< T > | FrustumCrop (const Cuboid &clipBox, Angle theta, Angle phi) const |
| | Creates a new point cloud which only consists of the points inside the clipBox, where the orientation of the two boundary planes Z=Zmin and Z=Zmax can be modified by angles theta and phi. More...
|
| |
| template<class T > |
| std::shared_ptr< T > | PlaneCrop (const Plane3D &plane, const ValueRange< double > &range, CropRange cropRange) const |
| | Creates a new point cloud where points within or outside a range parallel to given plane are cropped. More...
|
| |
| template<class T > |
| std::shared_ptr< T > | PlaneCrop (const Plane3D &plane, double threshold, CropDirection cropBelowAbove=CropDirection::Below) const |
| | Creates a new point cloud which only consists of the points below or above given plane. More...
|
| |
| PointCloudPtr | Downsample (DownSampleMode mode, int value) const |
| | Creates a new point cloud which has several points being removed dependent on the down sample mode and value. More...
|
| |
| PointCloudPtr | Duplicate () const |
| | Creates a new point cloud which is a copy this point cloud. More...
|
| |
| void | Save (const String &fileName) const |
| | Saves the given point cloud to the file with the given FileName. More...
|
| |
| PointCloudPtr | Convert (PointCloudFlags flags) const |
| | Creates a new point cloud, which is a copy from this point cloud, but with possibly different data type and number of components. More...
|
| |
| PointCloudPtr | Scale (Factors3D factors) const |
| | Creates a new point cloud with all points being scaled by the given factors. More...
|
| |
| PointCloudPtr | Transform (const AffineMatrix3D &transformation) const |
| | Creates a new point cloud with all points being transformed by the given transformation. More...
|
| |
| PointCloudPtr | Transform (const Matrix3DH &transformation) const |
| | Creates a new point cloud with all points being transformed by the given transformation. More...
|
| |
| void | Transform (const AffineMatrix3D &affineTransformation, PointCloud &pointCloud) |
| | Transforms all points in this point cloud by the given AffineTransformation and stores them in the given point cloud. More...
|
| |
| void | Transform (const Cvb::Matrix3DH &transformation, PointCloud &pointCloud) |
| | Transforms all points in this point cloud by the given transformation and stores them in the given point cloud. More...
|
| |
| std::unique_ptr< Cvb::Image > | RangeMap (ValueRange< double > xRange, ValueRange< double > yRange, Size2D< int > size, double background) const |
| | Creates a new range map image via linear projection in negative z-direction. More...
|
| |
| int | PlaneCount () const noexcept |
| | Gets the number of planes enumerated by this object. More...
|
| |
| std::vector< PlanePtr > | Planes () const |
| | Gets all available planes enumerated by this object. More...
|
| |
| PlanePtr | Plane (int index) const |
| | Index based plane access. More...
|
| |
| size_t | MemorySize (PointCloudFlags flags, Cvb::PointCloudFileFormat format) const |
| | Determines the amount of memory needed for ToMemory. More...
|
| |
| template<class Point > |
| size_t | MemorySize (Cvb::PointCloudFileFormat format) const |
| | Determines the amount of memory needed for ToMemory. More...
|
| |
| void | ToMemory (PointCloudFlags flags, Cvb::PointCloudFileFormat format, size_t size, void *buffer) const |
| | Saves the point cloud to the memory in the given format. More...
|
| |
| template<class Point > |
| void | ToMemory (Cvb::PointCloudFileFormat format, size_t size, std::uint8_t *buffer) const |
| | Saves the point cloud to the memory in the given format. More...
|
| |
| void * | Handle () const noexcept |
| | Returns C-API style handle to Node Object. More...
|
| |
A sparse Cartesian 3D point cloud object.
A sparse point cloud is logically seen an array of 3D points. There is no order or neighboring information between the single points.
It has less memory than a dense point cloud.
Conversion to a dense point cloud is difficult, as the grid thus neighbor information is missing.
- See also
- DensePointCloud
 Public Member Functions inherited from PointCloud
Public Member Functions inherited from PointCloud