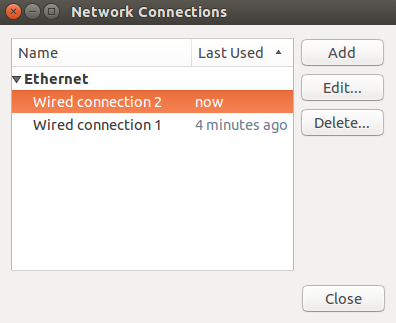
To optimize the network card under Linux open the Network Connections Dialog or with direct terminal commands.
Using the dialog window the "Wired connection x” from the list has to be selected and the "Edit" button to has be used.
Depending on the network card driver, some of the settings described below may occur under a separate dialog page.
Receive Buffers
This parameter has to be set to the maximum available value.
If it is too low you can loose huge amount of packets while streaming images.
To change the Receive Descriptors on Linux you need to download ethtool from the installed packet manager.
Get Descriptor Information from eth2 : >sudo ethtool -g eth2
Set Receive Descriptors of eth2 to 2048 : > sudo ethtool -G eth2 rx 2048
Jumbo Frames / Jumbo Packets
Jumbo Frames are necessary when the maximum network bandwidth is needed. E.g. when using a fast camera or a high resolution camera.
Because of this the recommendation is to always use Jumbo Frames when possible.
for eth2 set : > sudo ifconfig eth2 mtu 8192 up
or with the dialog :
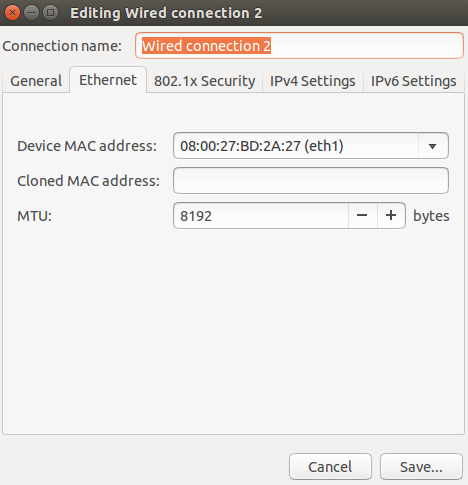
NOTE: When activated in the network card this does not mean that Jumbo Frames are used. This only means that the network card can handle Jumbo Frames.
To really use Jumbo Frames this has to be activated in the camera by setting the packet size to the appropriate value.
The appropriate value depends on the maximum available packet size in the camera and the maximum setting in the network card.
As recommendation use 8192 as PacketSize if supported by camera and network card, it was used very often without problems.
Normally, if Jumbo Frames are disabled, this does not cause problems with lost packets or lost frames.
But as the camera is not able to send the images as fast as they are acquired from the sensor, you can have a visible delay in the live image.