GigE Vision standard
From the user's perspective, the GigE Vision standard consists of three parts:
Device Discovery
As this is a network protocol, devices must be found first.
For this, the GigE Vision standard allows users to search for cameras in a sub-network.
Cameras, in this case, play a passive part and respond to queries.
The response to a query also contains information on the devices discovered, e.g., names and versions.
GVCP (GigE Vision Control Protocol)
The core purpose of the GVCP is the control of cameras on a register basis. An application reads out and writes individual data blocks.
Every data block (register) represents one or several features such as the exposure time for the sensor.
GVSP (GigE Vision Streaming Protocol)
GVSP provides a protocol for streaming non-compressed and - since version 2.0 - also compressed data streams.
GigE Vision performance
The performance level of a GigE Vision system depends strongly on the hardware and software components and their configuration.
The maximum data rate from 125 MByte/s is just a theoretical number as within this 125 MByte also data are send which are not directly related to the image.
A realistic, stable payload value for image calculation is 100MByte/s.
Below and in the next chapters performance considerations and settings are described.
System Requirements
•GigE Vision-compliant camera hardware,
•Ethernet Cable with minimum Cat 5e standard required. Cat 6 is preferred for long distances. Unshielded cables must not being used in general.
(CAT6 cables can be used for frequencies up to 250 MHz, whereas CAT6a cables can be used up to 500 MHz, fulfilling the bandwidth requirements of 10-Gigabit-Ethernet.)
•Network Interface Card (NIC) supporting 1000Mb/s and Jumbo Packets. It has to be configured with optimal Performance Settings.
•If a switch is used the switch has to support 1000Mb/s and Jumbo Packets (Frames) too. Refer Switch Selection.
Driver Implementation
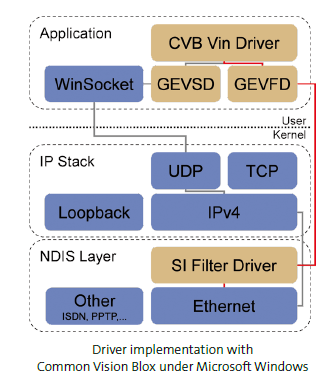
Due to the fact that the GigE Vision standard is a mere protocol description, generic driver implementations are possible.
The simplest and most portable solution is to use the operating system IP network stack.
This is often referred to as socket driver because all large operating systems provide the socket interface for network access (e.g. Windows Sockets or POSIX Sockets).
However, normally this solution offers the poorest performance. Improvements are available by adopting the so-called high performance or filter drivers.
Typical of both driver types is that they bypass the generic operating system network stack to provide better performance by specialised implementation.
The driver runs in the operating system kernel and can therefore work on network data with the highest priority.
Image data compilation already occurs in the driver and the image as a whole is transferred to the application.
Because the network stack is bypassed, less CPU capacity is bound up and data security improves (fewer lost packages) due to the higher CPU priority.
Even if the implementation of both driver types is different (driver directly for one network chip or generically for all network cards in the Windows filter stack),
both offer the same improved performance for the protocol structure of GigE Vision.